En robotarm som styrs av andningen har skapats: "den är som en tredje arm"
En ny högteknologisk lösning har skapats för dem som har förlorat motoriska funktioner: detta är robotarmar designade av neuroingenjörer. Låt oss ta reda på mer om dem.
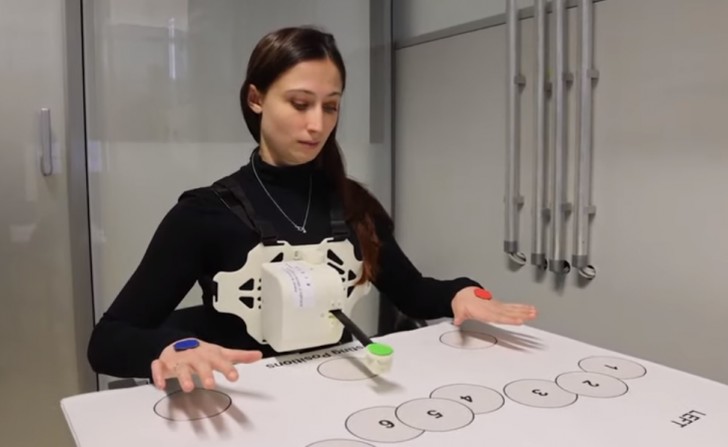
En robotarm för återställning av motoriska funktioner
EPFL/Youtube screenshot
Att förlora sensoriska och motoriska funktioner efter olyckor, traumatiska händelser eller neurologiska problem är något som drabbar många människor. Neuroingenjören Silvestro Micera, ordförande för Bertarelli Foundation och Translational Neuroingeenering vid EPFL i Schweiz, och professor i bioelektronik på Scuola Superiore Sant'Anna, arbetade just för dem, han inriktade sitt arbete på att förbättra människokroppens kognitiva funktioner, och har lyckats med att designa tekniska och avancerade lösningar.
I studien som han och hans team har publicerat beskriver han metoden för att övervaka diafragmans rörelser för att kunna använda en robotarm som lagts till på kroppen.
Micera förklarade: "Denna studie öppnar upp för nya och spännande möjligheter genom att visa att ytterligare armar kan kontrolleras i stor utsträckning och att samtidig kontroll med de båda naturliga armarna är möjlig.".
Forskningen ingår i Third-Arma-projektet, vars mål är att tillhandahålla en robotarm som kan ge assistans vid utförandet av dagliga aktiviteter, men också vid räddnings- och sökinsatser.
"Den främsta motivationen för denna tredje armkontroll är att förstå nervsystemet. Om du utmanar hjärnan att göra något helt nytt kan du ta reda på om den har förmågan att göra det och om det är möjligt att underlätta denna inlärning. Vi kan sedan överföra denna kunskap till att utveckla till exempel hjälpmedel för personer med funktionsnedsättning eller protokoll för rehabilitering efter en stroke.".
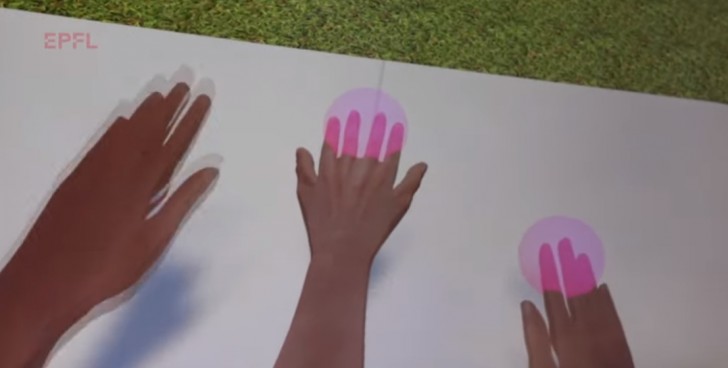
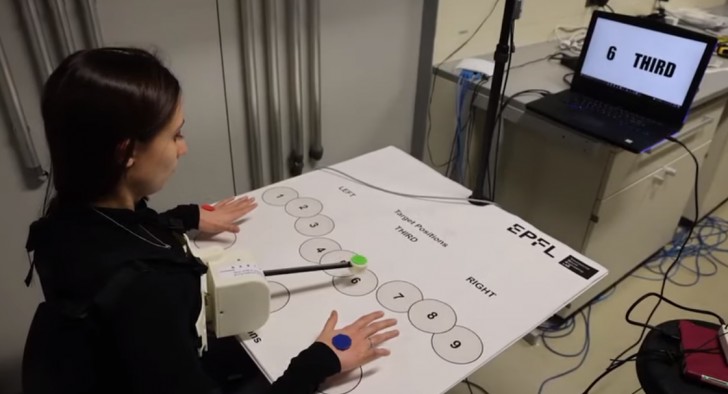
Testet för den tredje armen i virtuell miljö
EPFL/Youtube screenshot
Studiens medförfattare Solaiman Shokur, senior forskare på EPFL, genom Neuro-X Institute, tillade: "Vi vill förstå om hjärnan är programmerad att kontrollera det naturen har gett oss och har visat att den kan anpassa sig för att koordinera nya lemmar i tandem med biologiska.".
I grund och botten, förklarar han, handlar det om att förvärva nya motoriska funktioner relaterade till förstärkning, utöver de som redan finns hos en individ, oavsett om individen är funktionsnedsatt eller inte.
"Ur ett nervsystemperspektiv är det ett kontinuum mellan rehabilitering och förbättring.".
Forskarna undersökte robotarmens potentiella kognitiva begränsningar genom att skapa en virtuell miljö, en icke-funktionsnedsatt individ försökte manövrera en virtuell arm genom att kontrollera diafragman. Testet visade att användningen av diafragman inte stör eller försvårar användningen av tal, blick eller fysiska armar. I den virtuella konfigurationen är den icke-funktionsnedsatta personen utrustad med ett bälte som upptäcker diafragmarörelser. Genom ett specifikt virtual reality-headset kan det se höger övre extremitet och en tredje central arm med en symmetrisk hand som består av sex fingrar. Detta val styrdes av önskan att undvika en preferensorientering mot vänster eller höger hand.
Vid denna tidpunkt ombads deltagaren att förlänga de virtuella händerna med motsvarande, inklusive den symmetriska handen. Med hjälp av ett exoskelett med båda fysiska armarna kan användaren manövrera både den vänstra och högra virtuella armen, medan bältet runt diafragman upptäcker rörelsen av den centrala symmetriska armen. Dessa testkonfigurationer utfördes med 61 deltagare i mer än 150 olika sessioner.
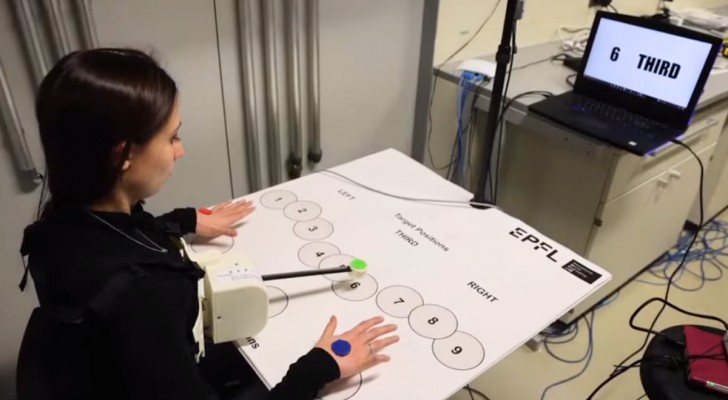
Den andningsstyrda robotarmen är enkel och intuitiv
EPFL/Youtube screenshot
Att styra diafragman för att flytta den tredje armen var väldigt intuitivt. Deltagarna lärde sig snabbt att kontrollera den. Därefter testade forskarna även kontrollen av diafragman med en robotarm, sammansatt av en enkel stav som sträcker sig när personen drar ihop diafragman.
Ett annat experiment, i linje med det virtuella, involverade att flytta datamusen genom att placera den över cirklar med först den högre, sedan den vänstra och sist med datorarmen.
Även om studien inte nämner ännu ett ytterligare experiment, undersöktes också möjligheten att använta örats rudimentala muskler för att utföra enkla handlingar. Öronsnäcksensorer fästes på personen som tränade genom att använda dessa musklers subtila rörelser för att styra datormusen i önskad riktning.
Shokur klargjorde att: "Användaren kan potentiellt använda sina öronmuskler för att kontrollera denna extra lem.". Micera förklarade vad det framtida fokuset kommer att vara: "Vårt nästa steg blir att utforska användningen av mer komplexa robotenheter med hjälp av våra olika kontrollstrategier, för att utföra verkliga uppgifter, både inom och utanför labbet. Först då kommer vi att kunna förstå den verkliga potentialen i detta tillvägagångssätt.".
Allt vi behöver göra nu är att vänta på den fortsatta utvecklingen av sensorimotoriska kontrollstrategier och alltmer avgörande gränssnitt mellan människa och maskin.